



It all started innocently enough: sometime last summer, I ran into the blog post Start your own Internet Resiliency Club on Hacker News.
Planet maemo
Now that 2025 is over, it’s time to look back and feel proud of the path we’ve walked. Last year has been really exciting in terms of contributions to GStreamer and WebKit for the Igalia Multimedia team.
With more than 459 contributions along the year, we’ve been one of the top contributors to the GStreamer project, in areas like Vulkan Video, GstValidate, VA, GStreamer Editing Services, WebRTC or H.266 support.
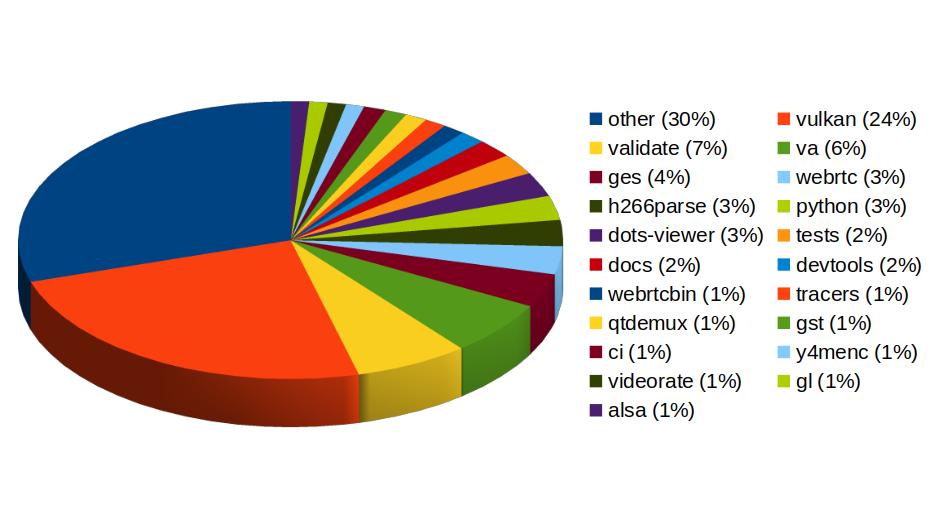 Igalia’s contributions to the GStreamer project
Igalia’s contributions to the GStreamer project
In Vulkan Video we’ve worked on the VP9 video decoder, and cooperated with other contributors to push the AV1 decoder as well. There’s now an H.264 base class for video encoding that is designed to support general hardware-accelerated processing.
GStreaming Editing Services, the framework to build video editing applications, has gained time remapping support, which now allows to include fast/slow motion effects in the videos. Video transformations (scaling, cropping, rounded corners, etc) are now hardware-accelerated thanks to the addition of new Skia-based GStreamer elements and integration with OpenGL. Buffer pool tuning and pipeline improvements have helped to optimize memory usage and performance, enabling the edition of 4K video at 60 frames per second. Much of this work to improve and ensure quality in GStreamer Editing Services has also brought improvements in the GstValidate testing framework, which will be useful for other parts of GStreamer.
Regarding H.266 (VVC), full playback support (with decoders such as vvdec and avdec_h266, demuxers and muxers for Matroska, MP4 and TS, and parsers for the vvc1 and vvi1 formats) is now available in GStreamer 1.26 thanks to Igalia’s work. This allows user applications such as the WebKitGTK web browser to leverage the hardware accelerated decoding provided by VAAPI to play H.266 video using GStreamer.
Igalia has also been one of the top contributors to GStreamer Rust, with 43 contributions. Most of the commits there have been related to Vulkan Video.
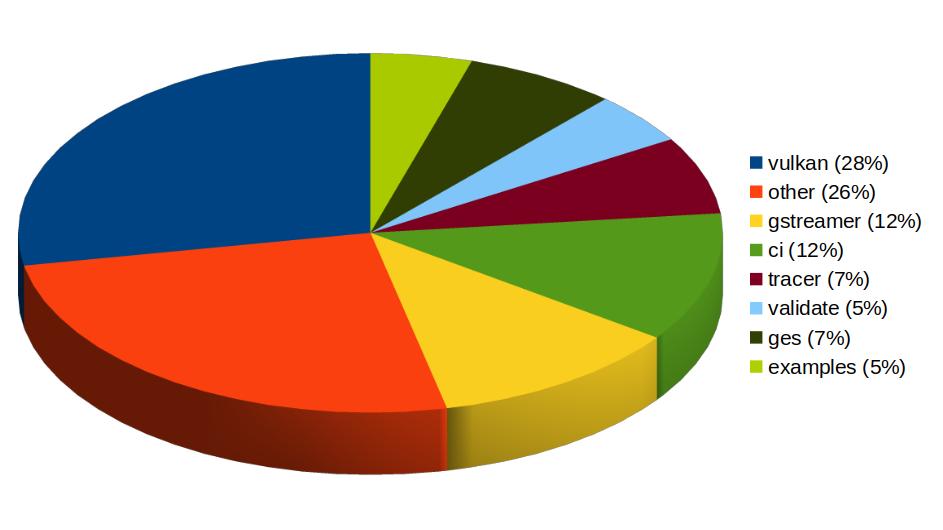 Igalia’s contributions to the GStreamer Rust project
Igalia’s contributions to the GStreamer Rust project
In addition to GStreamer, the team also has a strong presence in WebKit, where we leverage our GStreamer knowledge to implement many features of the web engine related to multimedia. From the 1739 contributions to the WebKit project done last year by Igalia, the Multimedia team has made 323 of them. Nearly one third of those have been related to generic multimedia playback, and the rest have been on areas such as WebRTC, MediaStream, MSE, WebAudio, a new Quirks system to provide adaptations for specific hardware multimedia platforms at runtime, WebCodecs or MediaRecorder.
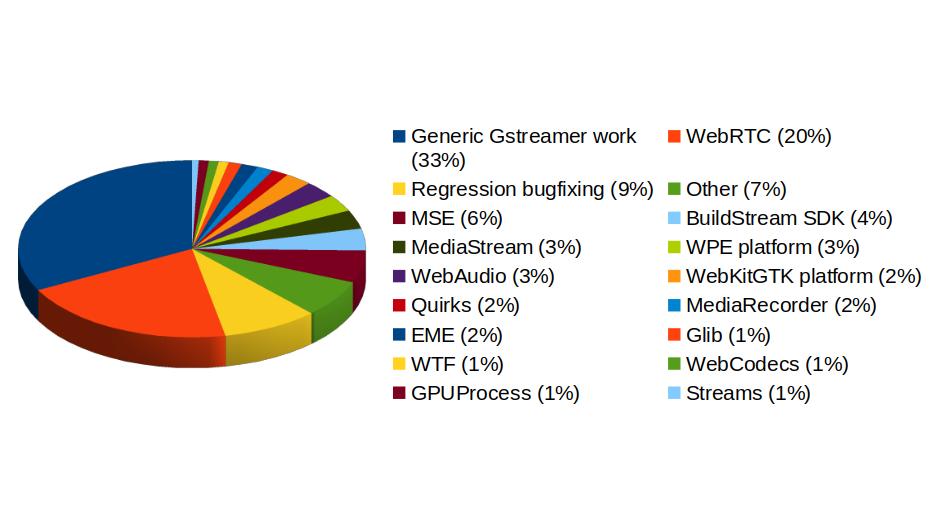 Igalia Multimedia Team’s contributions to different areas of the WebKit project
Igalia Multimedia Team’s contributions to different areas of the WebKit project
We’re happy about what we’ve achieved along the year and look forward to maintaining this success and bringing even more exciting features and contributions in 2026.
Some years ago I had mentioned some command line tools I used to analyze and find useful information on GStreamer logs. I’ve been using them consistently along all these years, but some weeks ago I thought about unifying them in a single tool that could provide more flexibility in the mid term, and also as an excuse to unrust my Rust knowledge a bit. That’s how I wrote Meow, a tool to make cat speak (that is, to provide meaningful information).
The idea is that you can cat a file through meow and apply the filters, like this:
cat /tmp/log.txt | meow appsinknewsample n:V0 n:video ht: \
ft:-0:00:21.466607596 's:#([A-za-z][A-Za-z]*/)*#'
which means “select those lines that contain appsinknewsample (with case insensitive matching), but don’t contain V0 nor video (that is, by exclusion, only that contain audio, probably because we’ve analyzed both and realized that we should focus on audio for our specific problem), highlight the different thread ids, only show those lines with timestamp lower than 21.46 sec, and change strings like Source/WebCore/platform/graphics/gstreamer/mse/AppendPipeline.cpp to become just AppendPipeline.cpp“, to get an output as shown in this terminal screenshot:
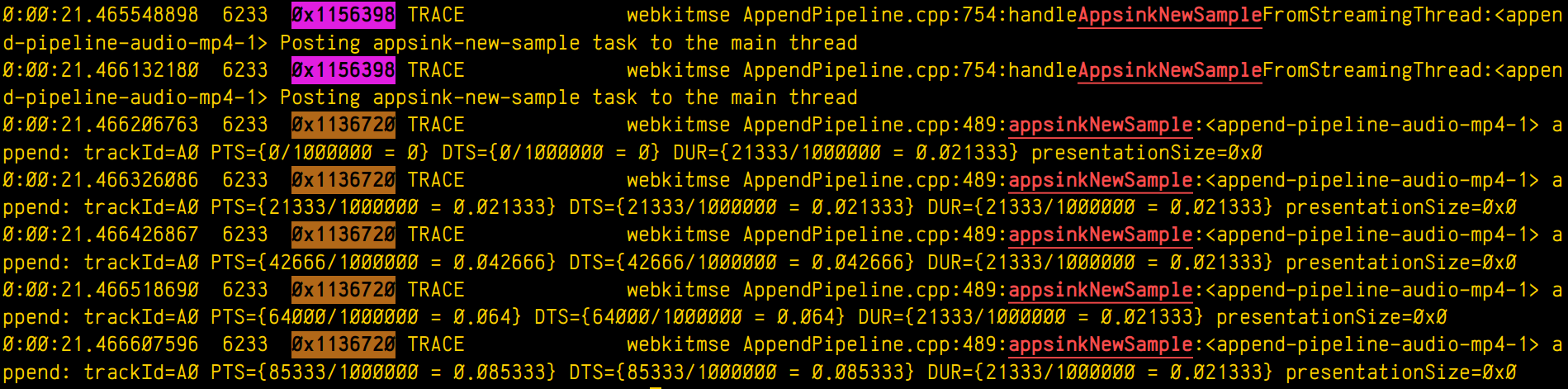
Cool, isn’t it? After all, I’m convinced that the answer to any GStreamer bug is always hidden in the logs (or will be, as soon as I add “just a couple of log lines more, bro”
I was playing around with Xlib this summer, and one thing led to another, and here we are with four fresh ports to retro mobile X11 platforms. There is even a Maemo Leste port, but due to some SGX driver woes on the N900, I opted for using XSHM and software rendering, which works well and has the nice, crisp pixel look (on Fremantle, it's using EGL+GLESv2). Even the N8x0 port has very fluid motion by utilizing Xv for blitting software-rendered pixels to the screen. The game is available over at itch.io.






This blog has been running more or less continuously since mid-nineties. The site has existed in multiple forms, and with different ways to publish. But what’s common is that at almost all points there was a mechanism to publish while on the move.
The <video> element implementation in WebKit does its job by using a multiplatform player that relies on a platform-specific implementation. In the specific case of glib platforms, which base their multimedia on GStreamer, that’s MediaPlayerPrivateGStreamer.
Move semantics can be very useful to transfer ownership of resources, but as many other C++ features, it’s one more double edge sword that can harm yourself in new and interesting ways if you don’t read the small print.
3D Gaussian splatting is the emerging rendering technique that is overtaking NeRFs. Since it is centered around point primitives, it is more compatible with traditional graphics pipelines that already support point rendering.
During all these years using GStreamer, I’ve been having to deal with GstSegments in many situations. I’ve always have had an intuitive understanding of the meaning of each field, but never had the time to properly write a good reference explanation for myself, ready to be checked at those times when the task at hand stops being so intuitive and nuisances start being important. I used the notes I took during an interesting conversation with Alba and Alicia about those nuisances, during the GStreamer Hackfest in A Coruña, as the seed that evolved into this post.
Just a quick update on something that I've been working on in my free time.
I recently refurbished my old Nintendo Wii, and for some reason I cannot yet explain (not even to myself) I got into homebrew programming and decided to port libSDL (the 2.x version -- a 1.x port already existed) to it. The result of this work is already available via the devkitPro distribution, and although I'm sure there are still many bugs, it's overall quite usable.
In order to prove it, I ported the game VVVVVV to the Wii:
During the process I had to fix quite a few bugs in my libSDL port and in a couple of other libraries used by VVVVVV, which will hopefully will make it easier to port more games. There's still an issue that bothers me, where the screen resolution seems to be not totally supported by my TV (or is it the HDMI adaptor's fault?), resulting in a few pixels being cut at the top and at the bottom of the screen. But unless you are a perfectionist, it's a minor issue.
In case you have a Wii to spare, or wouldn't mind playing on the Dolphin emulator, here's the link to the VVVVVV release. Have fun! :-)

Maemo Community e.V. - Invitation to the General Assembly 2023
Dear Member,
The meeting will be held on Friday, December 29th 2023 at 12:00 CET on irc.libera.chat channel #maemo-meeting.
Unless any further issues are raised, the agenda includes the following topics:
1. Welcome by the Chairman of the Board
2. Determination of the proper convocation and the quorum of the General Assembly
3. Acceptance of the annual report for the fiscal year and actions of the Executive
6. Any other business
Requests for additions to the agenda must be submitted to the Board in writing one week prior to the meeting (§ 9.2 of the Statutes).
On Behalf of the Maemo Council, Jussi Ohenoja
Recently there was an large rework to the STB single-file image_resize library (STBIR) bumping it to 2.0. While the v1 was really slow and merely usable if you needed to quickly get some code running, the 2.0 rewrite claims to be more considerate of performance by using SIMD. So lets put it to a test.
As references, I chose the moderately optimized C only implementation of Ogre3D and the highly optimized SIMD implementation in OpenCV.
Below you find time to scale a 1024x1024px byte image to 512x512px. All libraries were set to linear interpolation. The time is the accumulated time for 200 runs.
RGBRGBAOgre3D 14.1.2660 ms668 msSTBIR 2.01632 ms690 msOpenCV 4.8245 ms254 msFor the RGBA test, STIBIR was set to the STBIR_4CHANNEL pixel layout. All libraries were compiled with -O2 -msse. Additionally OpenCV could dispatch AVX2 code. Enabling AVX2 with STBIR actually decreased performance.
Note that while STBIR has no performance advantage over a C only implementation for the simple resizing case, it offers some neat features if you want to handle SRGB data or non-premultiplied alpha.